{kind=link}
{kind=link}
<<<<<<< HEAD
DIY-Multiprotocol-TX-Module
=======
Overview of the MPTM
The Multiprotocol Tx Module (or MPTM) is a 2.4GHz transmitter module which enables almost any TX to control lot of different models available on the market.
The source code is partly based on the Deviation TX project, thanks to all the developers for their great job on protocols.
refs/remotes/pascallanger/master
Quicklinks
- Download latest releases of the firmware
- Forum on rcroups
- Available Protocols list
- The old documentation
- Documentation to-do list
<<<<<<< HEAD Fork du projet https://github.com/pascallanger/DIY-Multiprotocol-TX-Module
Afin d'ajouter :
- Une sélection du protocole via les manches de la radio
- Un rebind hardware en PPM
- La radio TARANIS (TAERB, B = rebind ;-) ) et redéclaration des radios
- Un script "LUA" afin de faciliter la position des manches
Programme des évolutions :
-
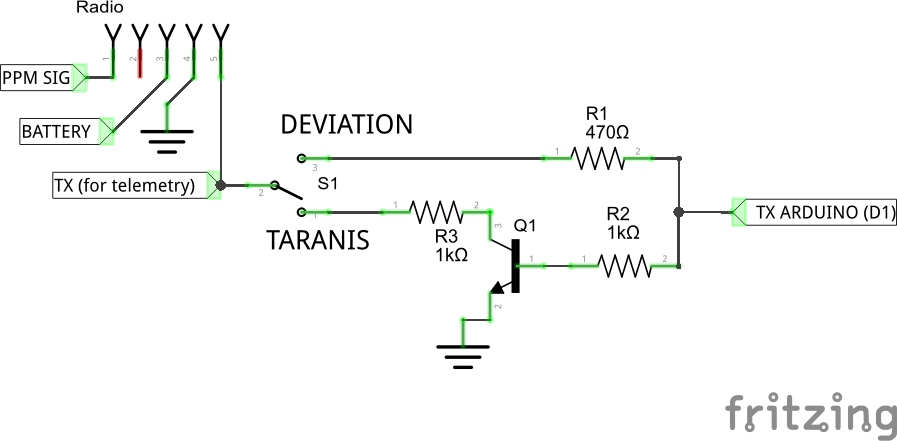
Ajout du de la télémetrie TARANIS à l'aide du projet https://github.com/shadow974/TxAdapter
(Attention, il faut rajouter un transistor afin d'inverser et amplifier le signal)
#Schematic
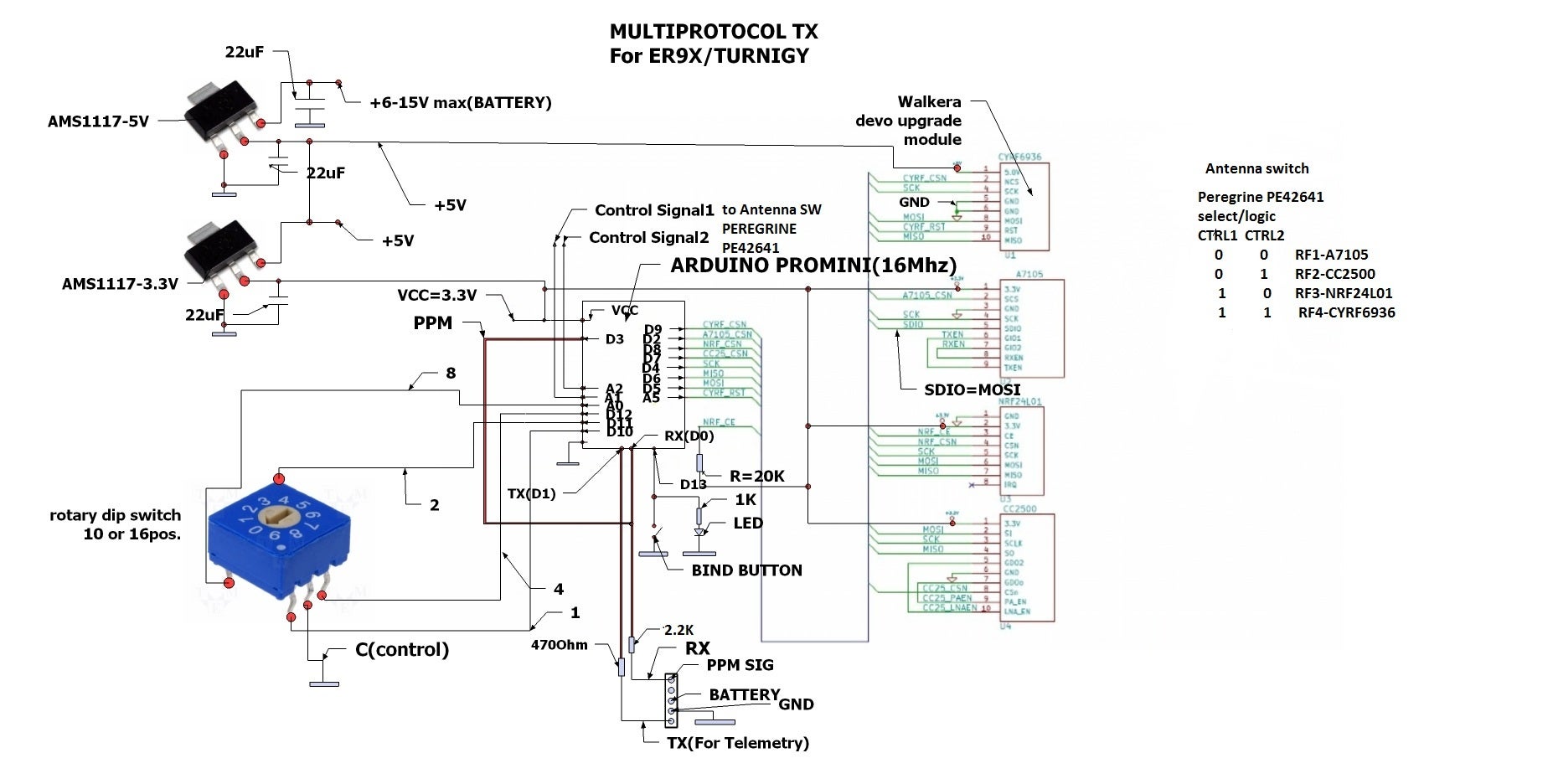
Notes:
- Attention: All modules are 3.3V only, never power them with 5V.
- For serial, the dial switch is not needed and the bind button optionnal
- Ajout d'un switch + transistor sur le TX
#Protocoles ajoutés mais non testés (Issue de Deviation) ##CYRF6936 RF Module ###J6PRO
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 | CH9 | CH10 | CH11 | CH12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 | CH9 | CH10 | CH11 | CH12 |
###WK2x01 Autobind
####Sub_protocol WK2401
| CH1 | CH2 | CH3 | CH4 |
|---|---|---|---|
| CH1 | CH2 | CH3 | CH4 |
####Sub_protocol WK2601 Option:
0 = 5+1
2 = 6+1
..1 = Hélicoptère (. = autres options pour ce mode)
.01 = Hélicoptère normal
.11 = Hélicoptère avec pit inversé
0.1 = Pitch curve -100
1.1 = Pitch curve 100
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 |
|---|---|---|---|---|---|---|
| CH1 | CH2 | CH3 | CH4 | ??? | CONF | Gyro & Rudder mix |
CONF: Option 1 = Rate Throtle
Option 2 = Pitch
####Sub_protocol WK2801
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 |
|---|---|---|---|---|---|---|---|
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 |
##A7105 RF Module ###Joysway
| CH1 | CH2 | CH3 | CH4 |
|---|---|---|---|
| A | E | T | R |
##CC2500 RF Module ###SKYARTEC
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 |
|---|---|---|---|---|---|---|
| ? | ? | ? | ? | ? | ? | ? |
##NRF24L01 RF Module ###BLUEFLY Autobind
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 |
|---|---|---|---|---|---|
| A | E | T | R | GEAR | PITCH |
###CFLIE Modele: CrazyFlie Nano quad
Autobind
| CH1 | CH2 | CH3 | CH4 |
|---|---|---|---|
| A | E | T | R |
###ESKY150
Autobind
| CH1 | CH2 | CH3 | CH4 |
|---|---|---|---|
| A | E | T | R |
###FBL100 Autobind
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 |
|---|---|---|---|---|---|---|---|
| ? | ? | ? | ? | ? | ? | ? | ? |
####Sub_protocol HP100 Same channels assignement as above.
###Fy326 Autobind
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 | CH9 |
|---|---|---|---|---|---|---|---|---|
| A | E | T | R | FLIP | HEADLESS | RTH | Calibrate | Expert |
####Sub_protocol FY319 Same channels assignement as above.
###H377
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 |
|---|---|---|---|---|---|---|---|
| A | E | T | R | CH5 | CH6 | CH7 | CH8 |
###HM830 Modele: HM Hobby HM830 RC Paper Airplane
Autobind
CH1|CH2|CH3|CH4|CH5 ---|---|---|--- A|Turbo|T|Trim|Bouton
###HONTAI Autobind
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 | CH9 | CH10 | CH11 |
|---|---|---|---|---|---|---|---|---|---|---|
| A | E | T | R | LED | FLIP | PICTURE | VIDEO | HEADLESS | RTH | Calibrate |
####Sub_protocol JJRCX1 Modele: JJRC X1
| CH5 | CH6 | CH7 | CH8 | CH9 | CH10 | CH11 | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| ARM | FLIP | PICTURE | VIDEO | HEADLESS | RTH | Calibrate |
###NE260 Modele: Nine Eagles SoloPro
Autobind
| CH1 | CH2 | CH3 | CH4 |
|---|---|---|---|
| A | E | T | R |
###UDI Modele: Known UDI 2.4GHz protocol variants, all using BK2421
- UDI U819 coaxial 3ch helicoper
- UDI U816/817/818 quadcopters
- "V1" with orange LED on TX, U816 RX labeled '' , U817/U818 RX labeled 'UD-U817B'
- "V2" with red LEDs on TX, U816 RX labeled '', U817/U818 RX labeled 'UD-U817OG'
- "V3" with green LEDs on TX. Did not get my hands on yet.
- U830 mini quadcopter with tilt steering ("Protocol 2014")
- U839 nano quadcopter ("Protocol 2014")
Autobind
| CH1 | CH2 | CH3 | CH4 | CH5 | CH6 | CH7 | CH8 | CH9 | CH10 |
|---|---|---|---|---|---|---|---|---|---|
| A | E | T | R | FLIP 360 | FLIP | VIDEO | LED | MODE 2 |
####Sub_protocol U816_V1 (orange) ####Sub_protocol U816_V2 (red) ####Sub_protocol U839_2014 Same channels assignement as above.
###D'autres à venir
Outline of the documentation
- Introduction (this page)
- Available protocols
- Compatible Transmitters
- Module Hardware options
- Compiling and programming the module (ATmega328) and Compiling STM32.
- Transmitter Setup
- How to for popular models
- Troubleshooting
- Advanced Topics (not for the fainthearted!)
Introduction
A functioning MPTM consists of (see image below):
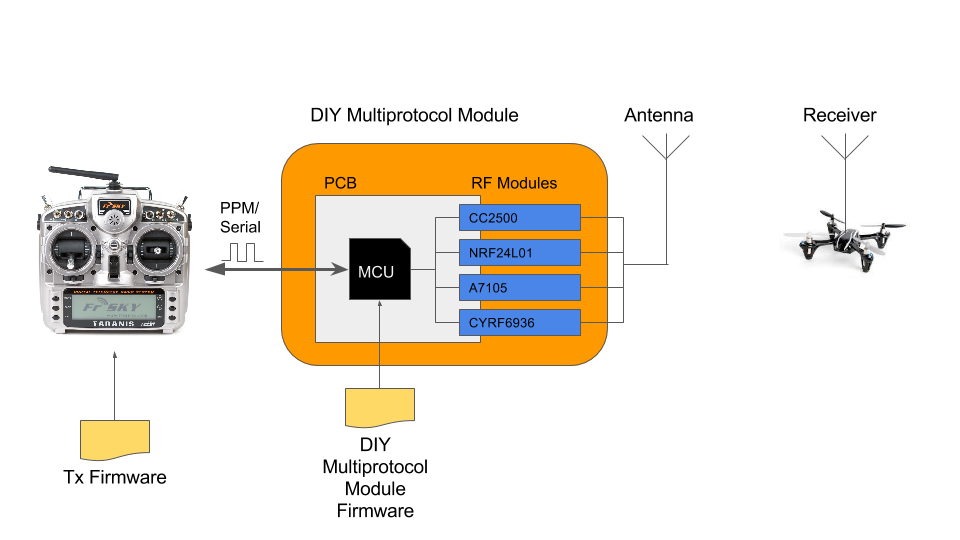
-
A host RC Tx
-
A Multiprotocol Transmitter Module that connects to a host transmitter. This module is typically comprised of
-
A microcontroller (currently ATMega328P) that interfaces with the Tx, controls the module functions and forwards the RC commands to the RF hardware
-
One or more (but at least one) RF modules that provide the capability to communicate with RC receivers. To communicate with the receiver the RF module in the Tx must match with the RF module type in the receiver. The four most common 2.4GHz RF chips on the market are supported TI CC2500, Nordic NRF24L01, Cypress CYRF6936, and the Amiccom A7105
-
MPTM firmware loaded on to the microprocessor. At a high level, this firmware performs a few different functions:
- It interfaces with signals from the host Tx and decodes these for transmission to the model, it manages the activation of the correct hardware RF module for each protocol
- It implements the unique communication protocols for each receiver/model and manages the all-important binding process with a receiver/model
- In the case of some protocols (for example DSMX and FrSky) it receives and decodes the telemetry information and makes this available to the receiver.
- The physical 2.4GHz antenna (or in some cases multiple antennas) for the modules
In constructing a functioning module there are important choices to be made and tradeoffs to be aware of. The most important are:
##Choice 1: Which MPTM hardware option
There are currently four generic paths to get your hands on an MPTM. These are outlined in detail on the hardware page. Here they are, in order of increasing difficulty:
- Ready-made MPTM - Available from Banggood which includes a 4-in-1 RF module and an antenna switcher
- DIY MPTM - Purchase one of the PCB options from OSHPark and then solder on your own components and RF modules
- OrangeRx MPTM You can improve the Orange Rx Transmitter module available from Hobbyking by uploading this firmware
- Scratchbuild a MPTM - Build the module from scratch using perfboard base, an Arduino Pro Mini and discrete components.
The last option is where it all started and how the pioneers in this project made their boards. However, due to the growing interest in “one module to rule them all” you now have options to purchase a ready-made board (with old firmware that you will need to upgrade).
For more information on these options see the hardware page
##Choice 2: Which RF modules to include in the MPTM
This depends on your specific needs. However, recent the availability of the 4-in-1 RF modules from Banggood for less than $35 makes it easy to “have it all”. Most manufacturers of RC systems (Spektrum, FrSky, FlySky) and toys (Syma, Hubsan, Horizon Hobby, etc.) use one of these four RF chips to manage the RF link between the transmitter and the reciever/model. Here is an incomplete list of the RF modules and some of the most popular toys that use them. For the complete list see the Protocol Details page.
| Manufacturer | RF Chip | Example Protocols |
|---|---|---|
| Cyprus Semiconductor | CYRF6936 | DSM/DSMX |
| Walkera Devo | ||
| J6Pro | ||
| Texas Instruments | CC2500 | FrSky |
| Futaba SFHSS | ||
| Amiccom | A7105 | FlySky |
| Turnigy (most) | ||
| Hubsan | ||
| Nordic Semiconductor | NRF24L01 | HiSky |
| Syma | ||
| ASSAN | ||
| and most other Chinese models |
For example, if you have no interest in binding your Tx to an model with and FrSky or Futaba SFHSS receiver you do not need to include the CC2500 RF module in your system.
##Choice 3: Which protocols to upload to the MPTM
Of course there always a catch. In this case it is the 32K memory limit on the ATmega328 processor. Due to the amazing work done by devs on this project, the memory required by all the possible protocols exceeds this limit considerably. This means that you will need to make a choice of which protocols you will compile into your firmware. Fortunately, the process of selecting and compiling is not too difficult and it is fully documented on the Compiling and Programming page. Also, the lead dev Pascal Langer (rcgroups:hpnuts) makes this process even easier for many users by making compiled binaries available for three popular combinations of RF modules. These are always “fresh” (based on the latest stable firmware) and available on the Releases page.
Midelic has ported a version the firmware to an STM32 ARM microcontroller. If you go the route of building this version of the DIY MPTM then the memory limits do not apply.
##Choice 4: Choosing the type of interface between the MPTM and your Tx (PPM or Serial)
The all the MPTM options supports industry standard PPM interface that works with all transmitters with either:
- a module bay or
- a trainer port or
- any PPM signal that can be accessed inside the Tx.
Most of the older FM radios support the PPM interface.
If you are the owner of a transmitter that supports the er9X/erSky9X or OpenTX firmwares (Frsky Taranis running erSky9x or OpenTx, or any of the FlySky/Turnigy family of Txs running ER9X, ERSky9x or OpenTx) you have the additional option to use a serial protocol to communicate between your Tx and the MPTM. (Owners of Walkera Devo transmitters should look at the Deviation Tx project for how to achieve the same end goal). This serial protocol does not require any hardware modifications, but will require updating the firmware on your radio. For those willing to do this, there are some nice advantages:
- The model and protocol selection and binding is done from the Model Settings menu on the Tx
- For telemetry capable receivers, the telemetry integration is done seamlessly with the Tx firmware. (Note that FrSky TH9X/Turnigy 9X/R transmitters require a telemetry mod to be done before telemetry can work) See the Setting up your Tx page for more details.
#How to get started?
- Browse the Protocols page to see which protocols you would like on your module
- Go to the Hardware Options page to decide which of the MPTM options appeals to you and which RF modules you plan to integrate
- Once you have your module, you should go to Compiling and Programming page to download, compile and program your MPTM
- Finally, you should visit the Setting up your Tx page to configure the last few settings before you can fly to your heart’s content!!!!!
Troubleshooting
Visit the Troubleshooting page. Please bear in mind that the MPTM is a complex system of hardware and software and it make take some patience to get it up and running. Also remember that the developers of the system are actual users of the system. This means that at any moment in time the system is working perfectly for them. A corollary to this is that if you are struggling there are likely two scenarios. First, that the problem is with your hardware or with your configuration, second, and much more unlikely but not impossible scenario, is that you are struggling with a new undiscovered bug. (The author of this documentation speaks from experience ;-) Please check the RC Groups forum and search for keywords relating to your problem before posting a reply. When you do post a reply please so humbly and respectfully – you will find many helpful people there. In your reply please include as much relevant information as possible and attach compilation output and _Config.h files as text attachments to keep the forum clean.
A final word
A very big thanks to all the people who have shared their time so graciously to create this great project. If you come across them on RC Groups, please be kind and show appreciation. In no particular order:
- Pascal Langer (rcgroups: hpnuts)
- Midelic (rcgroups: midelic)
- Mike Blandford (rcgroups: Mike Blandford)
- PhracturedBlue – from Deviation-tx
- goebish – from Deviation-tx
- victzh – from Deviation-tx
- hexfet – from Deviation-tx
Your help would be greatly appreciated. If protocol reverse-engineering and dev is not your thing then any help with testing and contributing to the documentation would be amazing. Given the number of different Tx/module hardware/RF module/protocol/model combinations the process of testing and documenting is a major bottleneck for the developers. Anything you can do to help will free them up to do even greater things.
refs/remotes/pascallanger/master