2016-09-30 13:36:12 +02:00
|
|
|
# DIY-Multiprotocol-TX-Module
|
|
|
|
|
|
|
|
|
|
 
|
|
|
|
|
|
|
|
|
|
Fork du projet https://github.com/pascallanger/DIY-Multiprotocol-TX-Module
|
|
|
|
|
|
|
|
|
|
Afin d'ajouter :
|
|
|
|
|
- Un rebind hardware en PPM
|
|
|
|
|
- La radio TARANIS (TAERB, B = rebind ;-) ) et redéclaration des radios
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Programme des évolutions :
|
|
|
|
|
- Ajout du futur protocole INAV
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
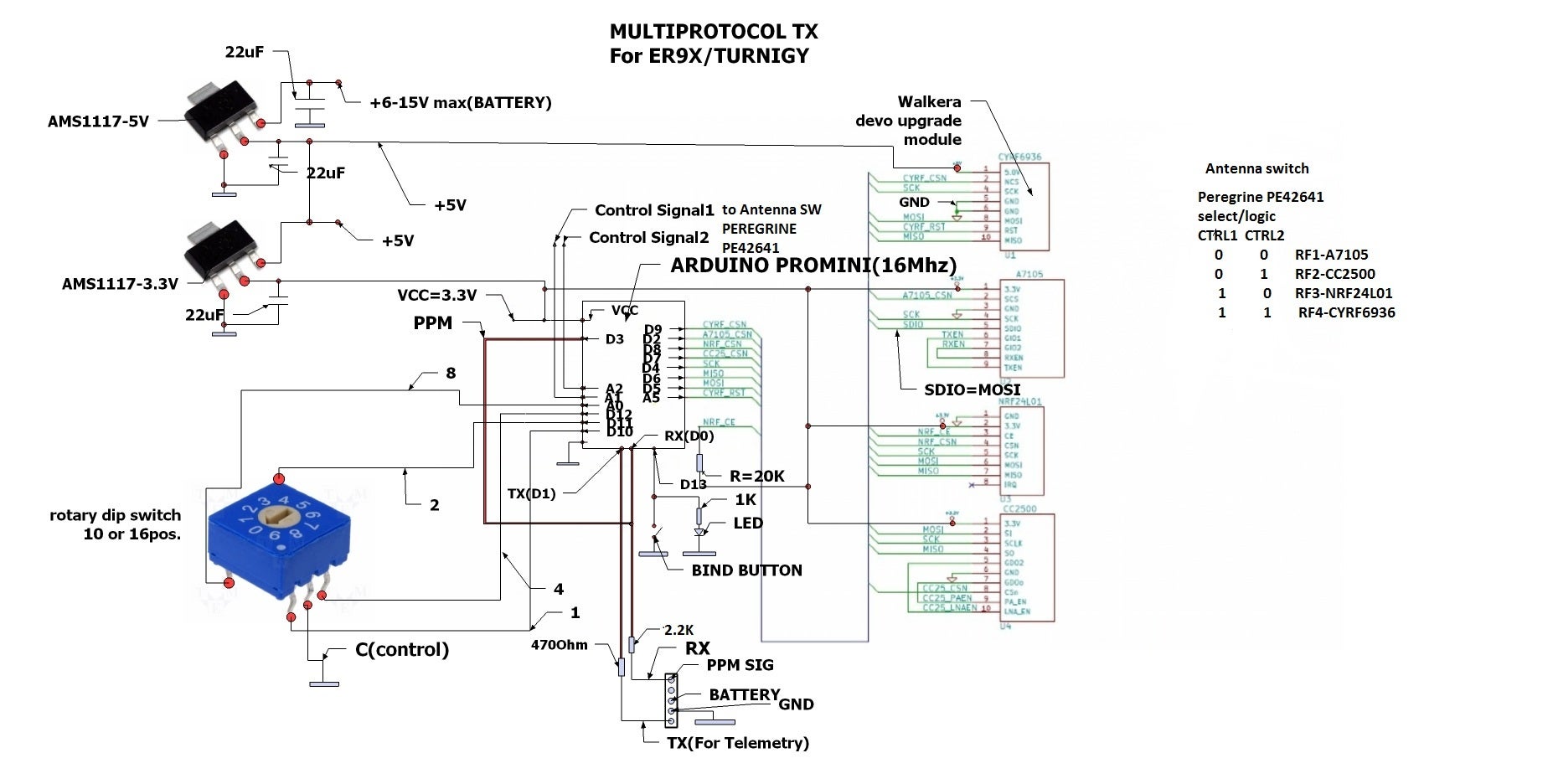
#Schematic
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Notes:
|
|
|
|
|
- Attention: All modules are 3.3V only, never power them with 5V.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
#Protocoles ajoutés mais non testés (Issue de Deviation)
|
|
|
|
|
##Other
|
|
|
|
|
###OPENLRS
|
|
|
|
|
Empty protocol
|
|
|
|
|
|
|
|
|
|
##CYRF6936 RF Module
|
|
|
|
|
###J6PRO
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11|CH12
|
|
|
|
|
---|---|---|---|---|---|---|---|---|---|---|---
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11|CH12
|
|
|
|
|
|
|
|
|
|
###WK2x01
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
####Sub_protocol WK2401
|
|
|
|
|
CH1|CH2|CH3|CH4
|
|
|
|
|
---|---|---|---
|
|
|
|
|
CH1|CH2|CH3|CH4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
####Sub_protocol WK2601
|
|
|
|
|
Option:
|
|
|
|
|
|
|
|
|
|
0 = 5+1
|
|
|
|
|
2 = 6+1
|
|
|
|
|
..1 = Hélicoptère (. = autres options pour ce mode)
|
|
|
|
|
.01 = Hélicoptère normal
|
|
|
|
|
.11 = Hélicoptère avec pit inversé
|
|
|
|
|
0.1 = Pitch curve -100
|
|
|
|
|
1.1 = Pitch curve 100
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7
|
|
|
|
|
---|---|---|---|---|---|---
|
|
|
|
|
CH1|CH2|CH3|CH4|???|CONF|Gyro & Rudder mix
|
|
|
|
|
|
|
|
|
|
CONF: Option 1 = Rate Throtle
|
|
|
|
|
|
|
|
|
|
Option 2 = Pitch
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
####Sub_protocol WK2801
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8
|
|
|
|
|
---|---|---|---|---|---|---|---
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
##A7105 RF Module
|
|
|
|
|
###Flysky AFHDS2A
|
|
|
|
|
Telemetry enabled for battery voltage and TX RSSI
|
|
|
|
|
Option= 0-PWM_IBUS 1-PPM_IBUS 2-PWM_SBUS 3-PPM_SBUS
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11|CH12|CH13|CH14|CH15
|
|
|
|
|
---|---|---|---|---|---|---|---|---|---|---|---|---|---|---
|
|
|
|
|
T|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11|CH12|CH13|CH14|Failsave T
|
|
|
|
|
|
|
|
|
|
###HUBSAN
|
|
|
|
|
Models: Hubsan H102D, H107/L/C/D and Hubsan H107P/C+/D+
|
|
|
|
|
|
|
|
|
|
Autobind protocol
|
|
|
|
|
|
|
|
|
|
Telemetry enabled for battery voltage and TX RSSI
|
|
|
|
|
|
|
|
|
|
Option=vTX frequency (H107D) 5645 - 5900 MHz
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9
|
|
|
|
|
---|---|---|---|---|---|---|---|---
|
|
|
|
|
A|E|T|R|FLIP|LIGHT|PICTURE|VIDEO|HEADLESS
|
|
|
|
|
####Sub_protocol H301
|
|
|
|
|
CH5|CH6|CH7|CH8
|
|
|
|
|
---|---|---|---
|
|
|
|
|
LED|STAB|RTH|VIDEO
|
|
|
|
|
|
|
|
|
|
####Sub_protocol H501
|
|
|
|
|
CH5|CH6|CH7|CH8|CH9|CH10|CH11|CH12
|
|
|
|
|
---|---|---|---|---|---|---|---|---|---|---|---
|
|
|
|
|
FLIP|LIGHT|RTH|VIDEO|HEADLESS|GPS_HOLD|ALT_HOLD|SNAPSHOT
|
|
|
|
|
|
|
|
|
|
###Joysway
|
|
|
|
|
CH1|CH2|CH3|CH4
|
|
|
|
|
---|---|---|---
|
|
|
|
|
A|E|T|R
|
|
|
|
|
|
|
|
|
|
##CC2500 RF Module
|
|
|
|
|
###SKYARTEC
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7
|
|
|
|
|
---|---|---|---|---|---|---
|
|
|
|
|
? | ? | ? | ? | ? | ? | ?
|
|
|
|
|
|
|
|
|
|
##NRF24L01 RF Module
|
2016-12-01 19:29:57 +01:00
|
|
|
###BAYANG
|
|
|
|
|
####Sub_protocol Normal
|
|
|
|
|
Models: EAchine H8(C) mini, BayangToys X6/X7/X9, JJRC JJ850, Floureon H101 ...
|
|
|
|
|
|
|
|
|
|
Autobind protocol
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10
|
|
|
|
|
---|---|---|---|---|---|---|---|---|----
|
|
|
|
|
A|E|T|R|FLIP|RTH|PICTURE|VIDEO|HEADLESS|INVERTED
|
|
|
|
|
|
|
|
|
|
####Sub_protocol Telemetry
|
|
|
|
|
Add telemetry for https://github.com/bikemike/H101-acro/tree/telemetry
|
|
|
|
|
CH11|CH12|CH13
|
|
|
|
|
---|---|---
|
|
|
|
|
Data Select|Data adjust|FlightMode
|
|
|
|
|
|
|
|
|
|
Data select : 5 steps(use a POT for this)
|
|
|
|
|
- min =previous data set
|
|
|
|
|
- low = first item in data set
|
|
|
|
|
- mid = second item in data set
|
|
|
|
|
- high= third item in data set
|
|
|
|
|
- max = next data set
|
|
|
|
|
Data adjust : 3 steps
|
|
|
|
|
- min=decrease current data value
|
|
|
|
|
- mid=neutral
|
|
|
|
|
- max=increase current data value
|
|
|
|
|
Flight Mode : 4 steps
|
|
|
|
|
|
2016-09-30 13:36:12 +02:00
|
|
|
###BLUEFLY
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6
|
|
|
|
|
---|---|---|---|---|---
|
|
|
|
|
A|E|T|R|GEAR|PITCH
|
|
|
|
|
|
|
|
|
|
###CFLIE
|
|
|
|
|
Modele: CrazyFlie Nano quad
|
|
|
|
|
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4
|
|
|
|
|
---|---|---|---
|
|
|
|
|
A|E|T|R
|
|
|
|
|
|
2016-10-19 21:07:30 +02:00
|
|
|
###CG023
|
2016-12-01 19:29:57 +01:00
|
|
|
####Sub_protocol H8_3D
|
2016-10-19 21:07:30 +02:00
|
|
|
Models: EAchine H8 mini 3D, JJRC H20/H22, JJRC H11D
|
|
|
|
|
|
|
|
|
|
CH5|CH6|CH7|CH8|CH9|CH10|CH11
|
|
|
|
|
---|---|---|---|---|---|---
|
|
|
|
|
FLIP|LIGTH|OPT1|OPT2|CAL|SNAPSHOT|VIDEO
|
|
|
|
|
|
|
|
|
|
JJRC H20: OPT1=Headless, OPT2=RTH
|
|
|
|
|
|
|
|
|
|
JJRC H22: OPT1=RTH, OPT2=180/360° flip mode
|
|
|
|
|
|
|
|
|
|
H8 3D: OPT1=RTH then press a direction to enter headless mode (like stock TX), OPT2=switch 180/360° flip mode
|
|
|
|
|
|
|
|
|
|
CAL: calibrate accelerometers
|
|
|
|
|
|
2016-09-30 13:36:12 +02:00
|
|
|
###ESKY150
|
|
|
|
|
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4
|
|
|
|
|
---|---|---|---
|
|
|
|
|
A|E|T|R
|
|
|
|
|
|
|
|
|
|
###FBL100
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8
|
|
|
|
|
---|---|---|---|---|---|---|---
|
|
|
|
|
? | ? | ? | ? | ? | ? | ? | ?
|
|
|
|
|
|
|
|
|
|
####Sub_protocol HP100
|
|
|
|
|
Same channels assignement as above.
|
|
|
|
|
|
|
|
|
|
###Fy326
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9
|
|
|
|
|
---|---|---|---|---|---|---|---|---
|
|
|
|
|
A|E|T|R|FLIP|HEADLESS|RTH|Calibrate|Expert
|
|
|
|
|
|
|
|
|
|
####Sub_protocol FY319
|
|
|
|
|
Same channels assignement as above.
|
|
|
|
|
|
|
|
|
|
###H377
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8
|
|
|
|
|
---|---|---|---|---|---|---|---
|
|
|
|
|
A|E|T|R|CH5|CH6|CH7|CH8
|
|
|
|
|
|
2016-10-19 21:07:30 +02:00
|
|
|
###HISKY
|
|
|
|
|
####Sub_protocol HK310
|
|
|
|
|
|
2016-09-30 13:36:12 +02:00
|
|
|
###HM830
|
|
|
|
|
Modele: HM Hobby HM830 RC Paper Airplane
|
|
|
|
|
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5
|
|
|
|
|
---|---|---|---
|
|
|
|
|
A|Turbo|T|Trim|Bouton
|
|
|
|
|
|
|
|
|
|
###HONTAI
|
|
|
|
|
Autobind protocol
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11
|
|
|
|
|
---|---|---|---|---|---|---|---|---|----|----
|
|
|
|
|
A|E|T|R|FLIP|LED|PICTURE|VIDEO|HEADLESS|RTH|CAL
|
|
|
|
|
|
|
|
|
|
####Sub_protocol HONTAI
|
|
|
|
|
####Sub_protocol JJRCX1
|
|
|
|
|
CH6|
|
|
|
|
|
---|
|
|
|
|
|
ARM|
|
|
|
|
|
|
|
|
|
|
####Sub_protocol X5C1
|
|
|
|
|
X5C1 clone
|
|
|
|
|
CH5|CH6|CH7|CH8|CH9|CH10|CH11
|
|
|
|
|
---|---|---|---|---|----|----
|
|
|
|
|
FLIP|LED|PICTURE|VIDEO|HEADLESS|RTH|CAL
|
|
|
|
|
####Sub_protocol FQ777
|
|
|
|
|
Format FQ777-951C
|
|
|
|
|
|
|
|
|
|
CH6|CH7|CH8|CH9
|
|
|
|
|
---|---|---|---
|
|
|
|
|
FLIP|SNAPSHOT|VIDEO|HEADLESS
|
|
|
|
|
|
|
|
|
|
###INAV
|
|
|
|
|
En cours de passage
|
|
|
|
|
|
2016-11-11 20:49:00 +01:00
|
|
|
###MJX
|
|
|
|
|
####Sub_protocol H26WH
|
|
|
|
|
|
2016-09-30 13:36:12 +02:00
|
|
|
###NE260
|
|
|
|
|
Modele: Nine Eagles SoloPro
|
|
|
|
|
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4
|
|
|
|
|
---|---|---|---
|
|
|
|
|
A|E|T|R
|
|
|
|
|
|
2016-11-11 20:49:00 +01:00
|
|
|
###Q303
|
|
|
|
|
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11
|
|
|
|
|
---|---|---|---|---|---|---|---|---|---|---
|
|
|
|
|
A|E|T|R|AHOLD|FLIP|SNAPSHOT|VIDEO|HEADLESS|RTH|GIMBAL
|
|
|
|
|
|
2016-09-30 13:36:12 +02:00
|
|
|
###UDI
|
|
|
|
|
Modele: Known UDI 2.4GHz protocol variants, all using BK2421
|
|
|
|
|
* UDI U819 coaxial 3ch helicoper
|
|
|
|
|
* UDI U816/817/818 quadcopters
|
|
|
|
|
- "V1" with orange LED on TX, U816 RX labeled '' , U817/U818 RX labeled 'UD-U817B'
|
|
|
|
|
- "V2" with red LEDs on TX, U816 RX labeled '', U817/U818 RX labeled 'UD-U817OG'
|
|
|
|
|
- "V3" with green LEDs on TX. Did not get my hands on yet.
|
|
|
|
|
* U830 mini quadcopter with tilt steering ("Protocol 2014")
|
|
|
|
|
* U839 nano quadcopter ("Protocol 2014")
|
|
|
|
|
|
|
|
|
|
Autobind
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10
|
|
|
|
|
---|---|---|---|---|---|---|---|---|---
|
|
|
|
|
A|E|T|R|FLIP 360|FLIP|VIDEO|LED|MODE 2
|
|
|
|
|
|
|
|
|
|
####Sub_protocol U816_V1 (orange)
|
|
|
|
|
####Sub_protocol U816_V2 (red)
|
|
|
|
|
####Sub_protocol U839_2014
|
|
|
|
|
Same channels assignement as above.
|
|
|
|
|
|
2016-10-19 21:07:30 +02:00
|
|
|
###V2X2
|
|
|
|
|
####Sub_protocol V2X2
|
|
|
|
|
Models: WLToys V202/252/272, JXD 385/388, JJRC H6C, Yizhan Tarantula X6 ...
|
|
|
|
|
|
|
|
|
|
CH1|CH2|CH3|CH4|CH5|CH6|CH7|CH8|CH9|CH10|CH11
|
|
|
|
|
---|---|---|---|---|---|---|---|---|----|----
|
|
|
|
|
A|E|T|R|FLIP|LIGHT|PICTURE|VIDEO|HEADLESS|MAG_CAL_X|MAG_CAL_Y
|
|
|
|
|
|
|
|
|
|
PICTURE: also automatic Missile Launcher and Hoist in one direction
|
|
|
|
|
|
|
|
|
|
VIDEO: also Sprayer, Bubbler, Missile Launcher(1), and Hoist in the other dir
|
|
|
|
|
####Sub_protocol JXD-506
|
|
|
|
|
CH10|CH11|CH12
|
|
|
|
|
----|----|----
|
|
|
|
|
ARM|EMERGENCY|PAN CAMERA
|
2016-09-30 13:36:12 +02:00
|
|
|
|
|
|
|
|
###D'autres à venir
|